ትግበራ
Cy- jp20KK ማይክሮፖት ማይክሮፖትሪድ የፀደይ ወቅት የስድብ ስፋት ማሽን በዋነኝነት ጥቅም ላይ የዋለው በተለያዩ ባለአደራዎች, በመኪና ተሽከርካሪዎች, በሞተር ብስክሌቶች እና በሌሎች የሞተር ተሽከርካሪዎች ውስጥ ጥቅም ላይ ይውላሉ. የልዩ ልዩነቶችን ድካም ፈተናን ለማገጣጠም ልዩ ማስተካከያዎች ሊደረግ ይችላል.
የማይክሮኮሜትሪድ የፀደይ ወቅት የስድጓድ የሙከራ ማሽን ከዘመናዊ የኤሌክትሮኒክስ ማነፃፀሪያ, ልኬት እና ከሌላው ከፍተኛ ደረጃ ጋር በመተባበር ላይ የተመሠረተ ከፍተኛ ደረጃ ያለው የከፍተኛ ጥራት ያለው የከፍተኛ ጥራት የዲክሎክ የሙከራ ሙከራ ማሽን ነው. የቴክኖሎጂ ዘዴዎች.
ዝርዝሮች
| ስም | ዝርዝር መግለጫ | ||
| 1 | ከፍተኛ የሙከራ ኃይል | 20 ኪን | |
| 2 | የሙከራ ጣቢያዎች ብዛት | 1 | |
| 3 | የሙከራ ድግግሞሽ | 0.5 ~ 5HZ | |
| 4 | ድግግሞሽ ማሳያ ትክክለኛነት | 0.1 hz | |
| 5 | የሙከራ አሻንጉሊት | ± 50 ሚሜ | |
| 7 | የመጠጥ ችሎታ | 1 ቢሊዮን ጊዜያት | |
| 8 | የማቆሚያ ትክክለኛነት መቁጠር | ± 1 | |
| 9 | የሙከራ ቁራጭ ከፍተኛ ውጫዊ ዲያሜትር | Φ90 ሚሜ | |
| 12 | የኃይል አቅርቦት Vol ልቴጅ (ባለሶስት ሽቦ አራት-አራት-ደረጃ ስርዓት) | 380vAC 50HZ | |
| 13 | ዋና የሞተር ኃይል | 7.5 ኪ. | |
| 14 | መጠን | አስተናጋጅ | 1200 * 800 * 2100 (ሰ) |
| የመቆጣጠሪያ ሳጥን | 700 * 650 * 1450 | ||
| 15 | ክብደት | 450 ኪ.ግ. | |
ቁልፍ ባህሪዎች
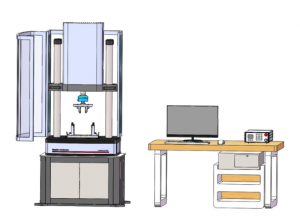
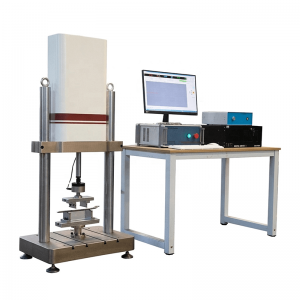
1.1 አስተናጋጅአስተናጋጁ በዋናነት ክፈፍ, ሜካኒካዊ የመጫኛ ዘዴ ዘዴ, የማስተላለፍ ዘዴ, እና ማስተላለፍ. ክፈፉ አንድ አምድ, የሥራ ቦታ, የመሳሰሻ መድረክ, የመሳሪያ ማንሳት አሠራር, የመሰረታዊ እና ሌሎች ክፍሎች. አምድ, ሰራተኛ, የሥራ ማሰባሰብ መድረክ, የላይኛው ጨረር, እና የእሳት ማጥፊያ ማሽኖች አብረው ተጭነዋል እናም በዋናነት ላይ በተጫነበት ላይ ተጭኗል. የተሞላው አስደንጋጭ ጠረጴዛ እና በእድገት መያዣው መካከል የተጫነ ሲሆን መሪውን በማስተካከል ላይ ተጭኗል, እና የተለያዩ የመጫኛ ዘዴዎች የሙከራ ቁራጭ በመቀየር ሊገኝ ይችላል ማደንዘዣው. መስፈርቶች.
1.2 የመጫን ዘዴእሱ የሞተር ማምረቻ ዘዴን የሚቀየር በሮድ አሠራር የሚይዝ በሮድ አሠራር የተዋቀረ የሜካኒካዊ አወቃቀር ነው, ተንሸራታቹን የመቆጣጠር ችሎታ በማስተካከል የእንቅስቃሴ ርቀት የሚመለስ የእንቅስቃሴ ርቀት የሚመለስ መስመራዊው የመንቀሳቀስ ርቀት ይመለስ በሙከራ ቁራጭ ከሚጠየቀው የሙከራ ጭቃ ጋር ሊስተካከል ይችላል.
1.3 ማስተላለፊያ ስርዓትየማስተላለፉ ዘዴ በሦስት-ደረጃ ተመሳሳይ ተመሳስሎ ሞተር እና የፍትሃዊነት ለውጥ ነው. የሙከራ ድግግሞሽ በዘፈቀደ ከ 0.5 እስከ 5 ኤች ኤስ ክልል ውስጥ ሊስተካከል የሚችል የሞተር ፍጥነት ሊስተካከል ይችላል.
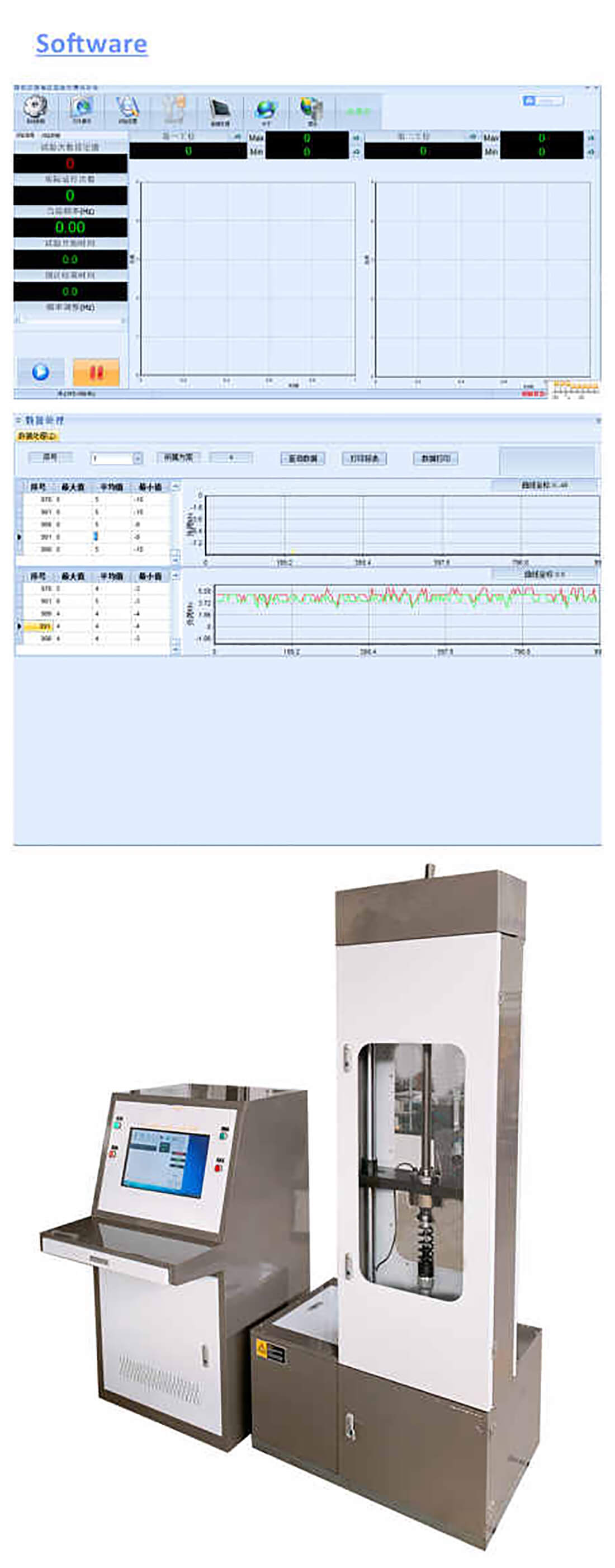
1.4 የመቆጣጠሪያ ስርዓትየኮምፒዩተር ልኬትና የቁጥጥር ስርአታች በድርጅታችን በተናጥል ታድሷል እና ያፈራል. የማስታወሻ ተግባር, ማለትም, ያ ታሪካዊ የሙከራ መረጃ በማንኛውም ጊዜ መድረስ ይችላል. የመለኪያ እና የመቆጣጠሪያ ስርዓቱ የሙከራ መሣሪያ ማዕከል ነው. በአንድ በኩል በሙከራው ወቅት የእያንዳንዱን አስደንጋጭ ሀላፊው የመረጃ ኃይል ምልክቱን በእውነተኛ ጊዜ ያሳያል, እና እንደ ፈተና ድግግሞሽ, የአሁኑ የሙከራ ጊዜ, እያንዳንዱ የሥራ ጭነት እና የጊዜ ሰሌዳ , የፈተና ሀይል ማቋረጫ, ወዘተ. በሌላ በኩል, በቁጥጥር መቆጣጠሪያዎች መሠረት በመቆጣጠሪያ መቆጣጠሪያዎች መሠረት መዘጋጀት አለባቸው, እንደ: ራስ-ሰር የመዝጋት ሙከራ ቁጥር, ለጠሀው ወቅታዊ መቆጣጠሪያዎች የመቆጣጠሪያ ምልክቶችን ይቆጣጠራል, የላይኛው እና የታችኛው የሙከራ ቦታ ማስተካከያ ዘዴን ይቆጣጠራል, በፈተናው ወቅት የተሳሳቱ እርምጃዎችን እና ኦፕሬተሩን እና መሳሪያዎችን ይከላከላል በስዕሉ እንደሚታየው ደህንነት: -
1.5 የሶፍትዌር ተግባር መግቢያ
1.5.1 የፈተናዎች ብዛት ሊዋቀር ይችላል. ከፍተኛው የጊዜ አቅም ያለው አቅም 1 ቢሊዮን ጊዜያት ነው.
1.5.2 የተደረጉት የቁጥሮች ብዛት የሚደርሰው የሙከራ ማሽን ፈተናውን ለማቆም ይቆጣጠራል.
1.5.3 የሙከራ ሶፍትዌር ስርዓቱ የሙከራ ድግግሞሽ እና በኮምፒተር በኩል የፈተናዎችን ብዛት ያሳያል እናም እረፍቱን እና መዘጋቱን ይፈርዳል.
1.5.4 አስደንጋጭ ሁኔታው የጩኸት ምትክ ከፍተኛው የሙከራ ኃይል ወደተጠቀሰው ጭነት በሚተላለፍበት ጊዜ በማናቸውም ጣቢያ እና በማቆም ተግባር ላይ ተጎድቷል.
1.5.5 የፈተና የኃይል-ሰአት ኩርባ የአንድ ነጠላ አስደንጋጭ ሁኔታ የእውነተኛ ጊዜ የማሳያ ተግባር አለው, እናም በሙከራ ዕቅዱ በተዋቀረው ናሙና ውስጥ ባለው የናሙና ጊዜ ውስጥ የመጫኛ ቦታን ይመዘግባል.
1.6 ዋናዎቹ ባህሪዎች እንደሚከተለው ናቸው
1.6.1 አሽነር እና ድግግሞሽ በነፃ ሊስተካከል ይችላል.
1.6.2 ሩብሪጅቲጅዲጅነት እና ድግግሞሽ ዲጂታል ማሳያ.
1.6.3 ራስ-ሰር የቅድመ-ጊዜ የሙከራ ጊዜያት, ከፍተኛ ብቃት.
1.6.4 አንድ ጥንድ አስደንጋጭ ሾርባዎች ፈተና ሊከናወን ይችላል, ወይም የብዙ ሁለት ጥንድ ጥንድ ጥንድ የመፈተኑ ምርመራ ሊከናወን ይችላል.
1.6.6 የመዘጋት ቅድመ-ቅምጥዎች ብዛት ላላቸው ሙከራዎች ሊያገለግል ይችላል,
1.6.7 የሙከራ ፋይብ የተጫነ ጭነት ጉድጓዶች አሉ,
1.6.8 ለአሻንጉሊት ማስተካከያ ምቹ በሆነ የአሻርነት ማስተካከያ መሳሪያ የታጠፈ,